Note
Go to the end to download the full example code
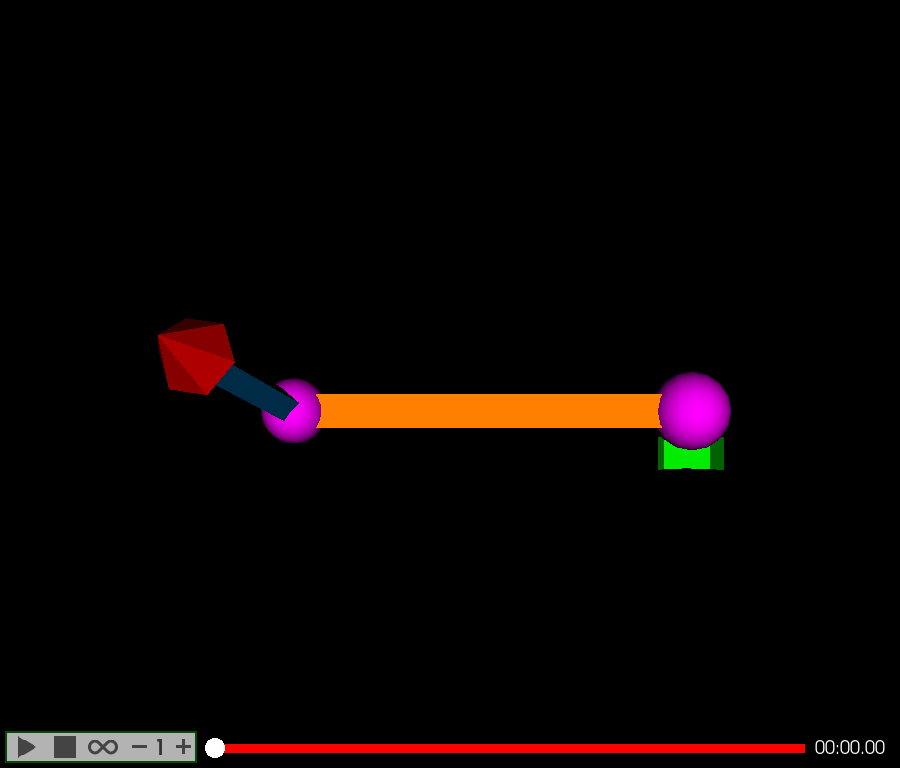
Arm Robot Animation#
Tutorial on making a robot arm animation in FURY.
import numpy as np
import fury
scene = fury.window.Scene()
showm = fury.window.ShowManager(
scene=scene, size=(900, 768), reset_camera=False, order_transparent=True
)
showm.initialize()
Creating robot arm components
base = fury.actor.cylinder(
np.array([[0, 0, 0]]), np.array([[0, 1, 0]]), colors=(0, 1, 0), radius=1
)
main_arm = fury.actor.box(np.array([[0, 0, 0]]), colors=(1, 0.5, 0), scales=(12, 1, 1))
sub_arm = fury.actor.box(
np.array([[0, 0, 0]]), colors=(0, 0.5, 0.8), scales=(8, 0.7, 0.7)
)
joint_1 = fury.actor.sphere(
np.array([[0, 0, 0]]), colors=np.array([1, 0, 1]), radii=1.2
)
joint_2 = fury.actor.sphere(np.array([[0, 0, 0]]), colors=np.array([1, 0, 1]))
end = fury.actor.cone(
np.array([[0, 0, 0]]),
np.array([[1, 0, 0]]),
np.array([[1, 0, 0]]),
heights=2.2,
resolution=6,
)
Setting the center of both shafts to the beginning.
Creating a timeline
timeline = fury.animation.Timeline(playback_panel=True)
Creating animations
main_arm_animation = fury.animation.Animation(
actors=[main_arm, joint_1], length=2 * np.pi
)
child_arm_animation = fury.animation.Animation(actors=[sub_arm, joint_2])
drill_animation = fury.animation.Animation(actors=end)
Adding other Animations in hierarchical order
main_arm_animation.add_child_animation(child_arm_animation)
child_arm_animation.add_child_animation(drill_animation)
Creating Arm joints time dependent animation functions.
Setting timelines (joints) relative position 1- Placing the main arm on the cube static base.
main_arm_animation.set_position(0, np.array([0, 1.3, 0]))
2- Translating the timeline containing the sub arm to the end of the first arm.
child_arm_animation.set_position(0, np.array([12, 0, 0]))
3- Translating the timeline containing the drill to the end of the sub arm.
drill_animation.set_position(0, np.array([8, 0, 0]))
Setting rotation time-based evaluators
main_arm_animation.set_rotation_interpolator(rot_main_arm, is_evaluator=True)
child_arm_animation.set_rotation_interpolator(rot_sub_arm, is_evaluator=True)
drill_animation.set_rotation_interpolator(rot_drill, is_evaluator=True)
Setting camera position to observe the robot arm.
scene.camera().SetPosition(0, 0, 90)
Adding the base actor to the scene
scene.add(base)
Adding the main parent animation to the Timeline.
timeline.add_animation(main_arm_animation)
Now we add the timeline to the ShowManager
showm.add_animation(timeline)
interactive = False
if interactive:
showm.start()
fury.window.record(scene=scene, out_path="viz_robot_arm.png", size=(900, 768))
Total running time of the script: (0 minutes 0.117 seconds)